製品情報 - 電動トルクドライバー PRO-FUSE
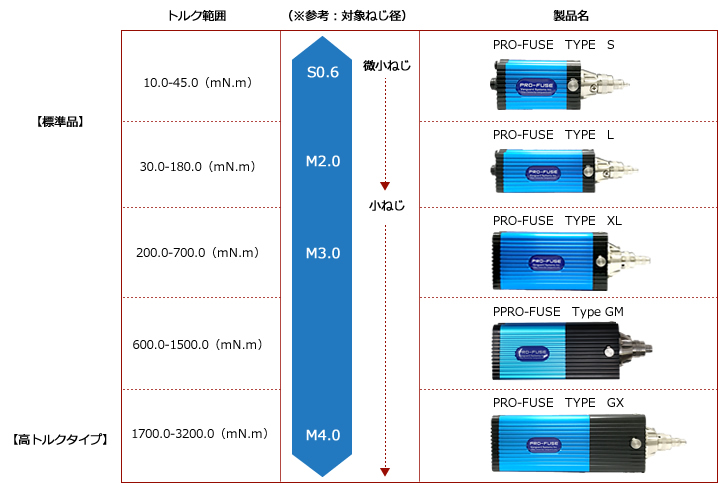
電動ドライバーの微小ねじ締め機.comの「PRO-FUSEシリーズ」(電動トルクドライバー)では、トルク範囲10.0~3200(mNm)まで対応可能です。また対象ねじ径は、S0.6(M0.6)~M5.0程度までの微小ねじ(マイクロスクリュー)対応が可能になります。

| 基本仕様: | PRO-FUSE TYPE S | PRO-FUSE TYPE L | PRO-FUSE TYPE XL |
| PRO-FUSE TYPE GM | PRO-FUSE TYPE GX |
特徴
特徴1高精度なトルク管理が可能
当社独自の制御技術により、ねじ締め経過、結果のトルクを設定・管理できます。
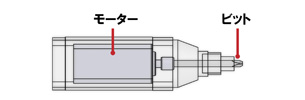
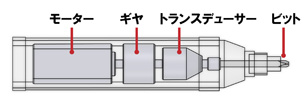
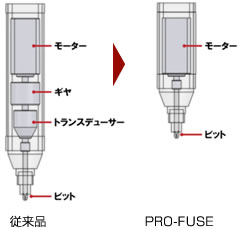
| 【機構】 | ギア、ロードセルが無く機械的損失がない、モータ直結のダイレクト制御 | ||||
|
|||||
| 【制御】 | 先進のアルゴリズムで高速・高精度トルク制御 |
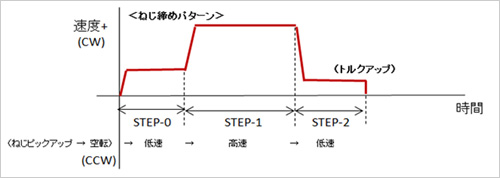
特徴2最適なねじ締めを実現する為の多彩なねじ締めパターン
PRO-FUSEでは、様々なねじ締め条件に対し、回転速度の変更が可能。同一プログラムで逆回転を入れる事も可能です。
※ 逆回転を入れる際は、最終的トルクアップする形でプログラムして下さい。
| ●推奨締付パターン: | 低速→高速→低速
|
| ●噛み込みを逆回転で回避: | 締結前にトルクアップしてしまう際に有効。一度緩めることで噛み込みが外れ、ねじ浮きの抑止、斜め締め時の位置補正等にも有効。 |
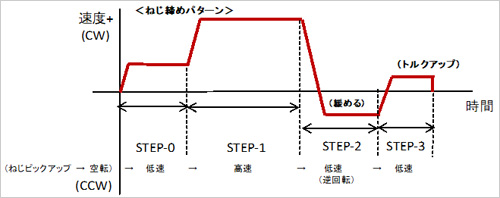

多彩なねじ締めパターンを16通りプログラム可能
アプリケーションソフト(ProE-Expert)で簡単な操作でねじ締めパターン(プログラム)を確認することができます。
| ●その他: |
|
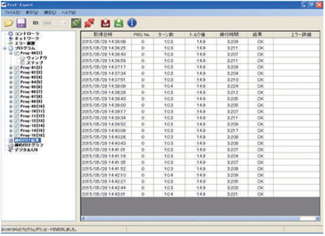
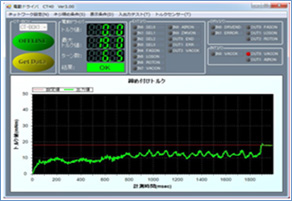
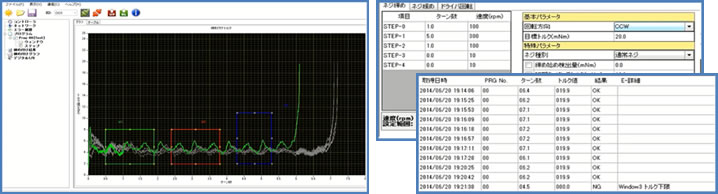
特徴3ねじ締め中のトルク値が取得可能・ねじ締め結果が取得可能 トレーサビリティ向上
PRO-FUSEは、アプリケーションソフト(ProE-Expert)でねじ締め中のトルク値をグラフに表示可能。
ねじ締め最中を視覚的にとらえることで、品質の向上、トルクスタディ(研究や分析)の手助けを行えます。
| 【ねじ締めトルク変動】 | 【ねじ締め結果】 | |
 ProE-Expert ProE-Expert |
 |
|
|
|
特徴4微小ねじ(S0.6-M2.0)締め付け
特徴51機種でのトルク範囲が広い
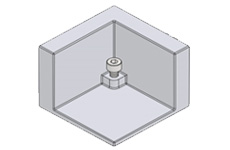
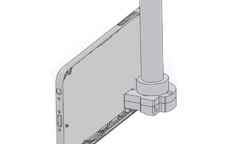
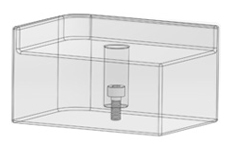
特徴6難関箇所のねじ締めのトータルソリューション
マウスピース、スライド、ビットの専用設計によって実現可能。
 |
 |
 |
||
| 障害物隣接 | オフセット(内側面) | 深穴 |
特徴7業界最速クラスのねじ締め付けサイクルタイムで安定した締め付けが可能。
 |
|
特徴8多彩な外部接続のインターフェイス
| 端子名称 | 略称 | メーカー | コネクタ型格 | 配線ケーブル・配線側コネクタ |
|---|---|---|---|---|
| 100BASE-T LAN接続端子 | LAN | 標準品 | RJ45 | お客様で御用意ください |
| ロボット通信接続端子 | I/O | JST | S20B-PUDSS-1 | お客様で御用意ください |
| 電源接続端子 | POW | JST | B3PS-VH | お客様で御用意ください |
| 制御用コントローラ・電動ドライバー間接続端子 | MOT | - | バンガード専用品 | 本セットに付属 |
特徴9ロボット搭載専用設計な為、機器サイズがコンパクトと内部配管構造ですきっりした形状
微小ねじ締め機.comでは、各種ロボットシステムに搭載可能です。多軸ロボット、スカラ・ロボット、XYロボット、双腕ロボット、パラレルリンクロボットなど各種ロボットシステムに搭載可能です。
| 多軸ロボット搭載 | スカラ・ロボット搭載 | XY・ロボット搭載 | 双腕ロボット搭載 | パラレルリンク ロボット搭載 |
||||
 |
 |
 |
 |
 |
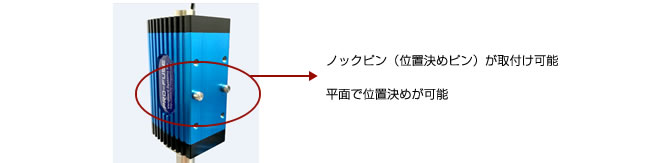
特徴10メンテナンス性と繰り返し脱着精度が良い
●ノックピンをドライバー側に付けることにより、位置決め精度が高く取付が容易です。
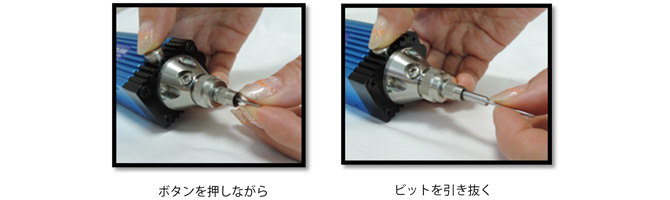
●ビット交換が容易。ドライバー(PRO-FUSE)本体をロボットから取り外すことなく、ワンプッシュで脱着可能です。
特徴11ランニングコストが安い
①ビットの長寿命 : ねじ締め付け完了直前に減速させることでビットの消耗を軽減します。
②構造がシンプル : ギアなどがなく、機械的故障がほとんどありません。
特徴12他社に無い 洗練されたデザイン!

用途
| <電子機器> | ●スマートフォン ●タブレット ●ウエラブル ●パソコン ●HUD(ヘッドアップディスプレイ) ●VRグラス/ARゴーグル ●スマートウオッチ ●カメラ |
| <家電製品> | ●照明機器 ●テレビ ●AV機器 ●ヘッドフォン |
| <精密機器> | ●腕時計 |
| <測定機器> | ●ノギス ●マイクロメーター |
| <医療機器> | ●分析機器 |
| <自動車> | ●ヘッドライト ●メーターパネル ●オートモーティブ(車載電装部品) ●カーナビゲーション ●インパネ ●センターコンソール ●計器クラスタ ●電子ミラー ●スマートルームミラー ●車載セカンダリディスプレイ ●センターインフォメーションディスプレイ ●インストルメントクラスタ ●マルチインフォメーション・ディスプレイ ●マルチファンクション・ディスプレイ ●アンテナ ●キーレスエントリー(スマートキー) |
| <その他> | ●ガストーチ |
上記、機器等の基板及び小物部品の締結に使用されます。
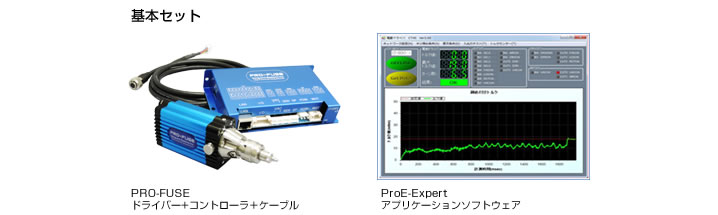
基本セット
●知能化ドライバーPRO-FUSE基本セット
- ドライバー+コントーラ+ケーブル(3.0m標準)
- ソフトウェア(ProE-Expert標準装備)

PRO-FUSE
ドライバー+コントローラ+ケーブル
ProE-Expert
アプリケーションソフトウェア
基本仕様
| 項目 | 単位 | Type S | Type L | Type XL |
|---|---|---|---|---|
| ねじサイズ目安 | mm | S0.6 - M1.2 | M1.2 - M2.0 | M2.0 - M3.0 |
| モータ | クローズドループ | クローズドループ | クローズドループ | |
| 減速機 | 無し | 無し | 無し | |
| 締付モード | 3モード(通常,タッピング,高速) | 3モード(通常,タッピング,高速) | 3モード(通常,タッピング,高速) | |
| 目標トルク 設定範囲 |
mN.m | 15.0-45.0(通常) /10.0-45.0 (タッピング,高速) |
50.0-180.0(通常) /30.0-180.0 (タッピング,高速) |
150.0-700.0(通常) /150.0-700.0 (タッピング,高速) |
| 最大回転速度 | RPM (min-1) |
1000(通常,タッピング)/1500(高速) | 1000(通常,タッピング,高速) | |
| 外形(幅) | mm | 30 | 47 | |
| 外形(高) | mm | 43 | 61 | |
| 外形(全長) | mm | 124(コネクタ部含まず) | 152(コネクタ部含まず) | 166(コネクタ部含まず) |
| 重量 | g | 約280 | 約405 | 約1,000 |
| 回転方向 | ドライバの回転方向指定 CW:時計回り CCW::反時計回り | |||
| 締め始め検出量 | mN.m | 0.0-10.0 | ||
| 初期タッピング トルク範囲 |
mN.m | 10.0-45.0 (タッピング,高速) |
30.0-180.0 (タッピング,高速) |
150.0-700.0 (タッピング,高速) |
| トルクアップ 検出時間 |
sec | 0.01-1.00 | ||
| ー側許容ターン数 | 回転 | -10.0-0.0 | ||
| +側許容ターン数 | 回転 | 0.0-10.0 | ||
| 増し締め角度 | ° | -360.0-360.0 | ||
| プログラム記憶数 | 16 | |||
| 入力信号 | プログラム:4Bits | |||
| ねじ締め/ねじ緩め:2Bits | ||||
| ローテーション:1Bit | ||||
| 予備:3Bits | ||||
| 出力信号 | トルクアップ:1Bit | |||
| ビジー:1Bit | ||||
| エラー:5Bits | ||||
| 予備:1Bit | ||||
| 供給電源 | DC24V | |||
| セット | 電動ドライバーPRO-FUSE基本セット | |||
| 電動ドライバー+コントーラ+ケーブル(3.0m標準) | ||||
| ソフトウェア(ProE-Expert標準装備) | ||||
| (基本セット型番) | PF-1-1-02-2-1-W | PF-1-1-04-4-1-W | PF-1-1-06-7-1-W | |
| 項目 | 単位 | Type GM | Type GX |
|---|---|---|---|
| ねじサイズ目安 | mm | M3.0-M4.0 | M4.0-M5.0 |
| モータ | クローズドループ | クローズドループ | |
| 減速機 | 遊星ギヤ | 遊星ギヤ | |
| 締付モード | 3モード(通常,タッピング,高速) | 3モード(通常,タッピング,高速) | |
| 目標トルク 設定範囲 |
mN.m | 600.0-1500.0(通常,タッピング,高速) | 1700.0-3200.0(通常,タッピング,高速) |
| 最大回転速度 | RPM (min-1) |
10-300(通常,タッピング)/10-400(高速) | |
| 外形(幅) | mm | 47 | |
| 外形(高) | mm | 61 | |
| 外形(全長) | mm | 183.5(コネクタ部含まず) | 208.5(コネクタ部含まず) |
| 重量 | g | 約1,100 | 約1,410 |
| 回転方向 | ドライバの回転方向指定 CW:時計回り CCW::反時計回り | ||
| 締め始め検出量 | mN.m | 0.0-10.0 | |
| 初期タッピング トルク範囲 |
mN.m | 600.0-1500.0 | 1700.0-3200.0 |
| トルクアップ 検出時間 |
sec | .01-1.00 | |
| ー側許容ターン数 | 回転 | -10.0-0.0 | |
| +側許容ターン数 | 回転 | 0.0-10.0 | |
| 増し締め角度 | ° | -360.0-360.0 | |
| プログラム記憶数 | 16 | ||
| 入力信号 | プログラム:4Bits | ||
| ねじ締め/ねじ緩め:2Bits | |||
| ローテーション:1Bit | |||
| 予備:3Bits | |||
| 出力信号 | トルクアップ:1Bit | ||
| ビジー:1Bit | |||
| エラー:5Bits | |||
| 予備:1Bit | |||
| 供給電源 | DC48V | ||
| セット | 電動ドライバーPRO-FUSE基本セット | ||
| 電動ドライバー+コントーラ+ケーブル(3.0m標準) | |||
| ソフトウェア(ProE-Expert標準装備) | |||
| (基本セット型番) | PF-1-3-04-4-1-W | PF-1-3-02-2-1-W | |
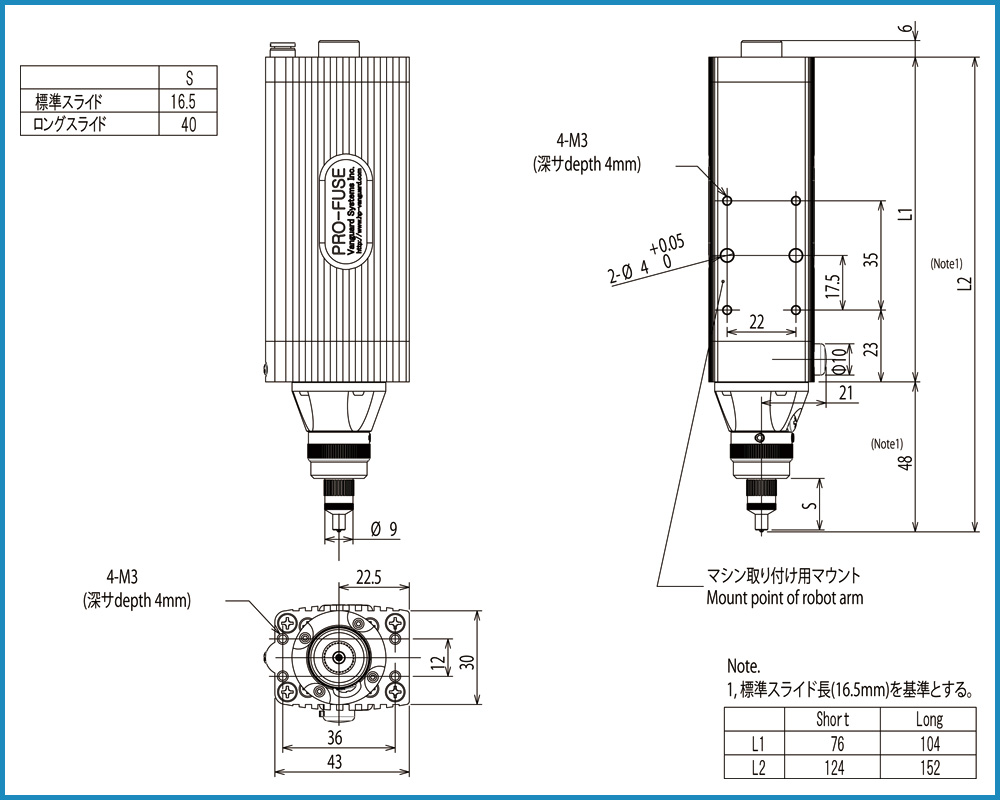
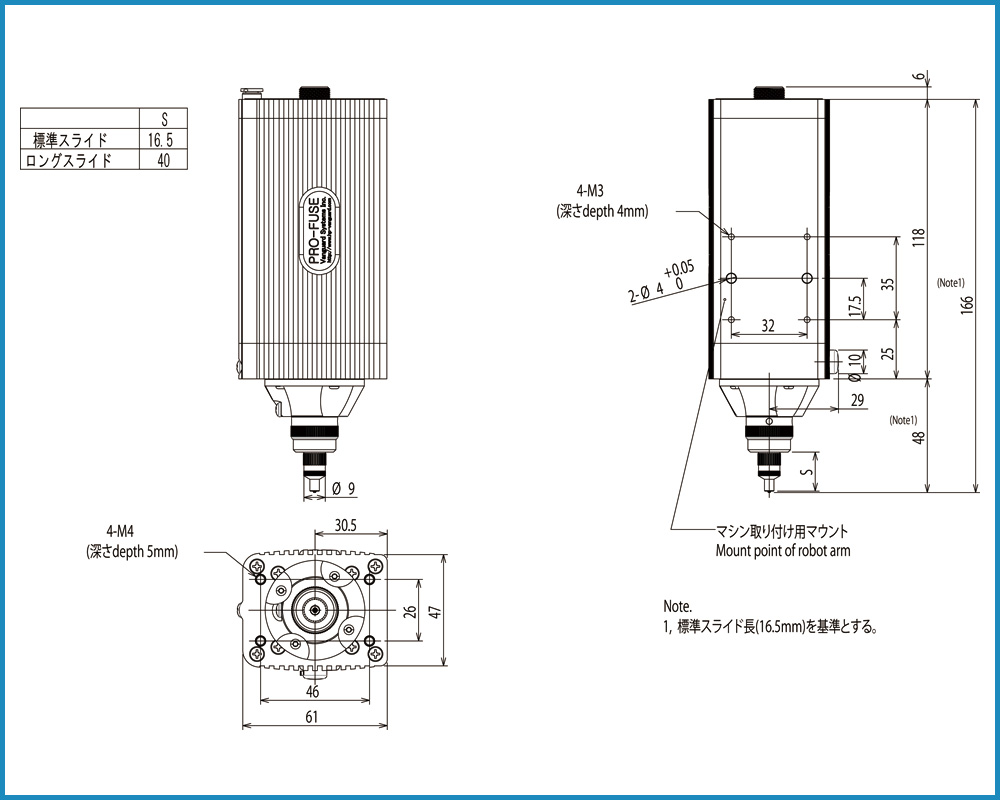
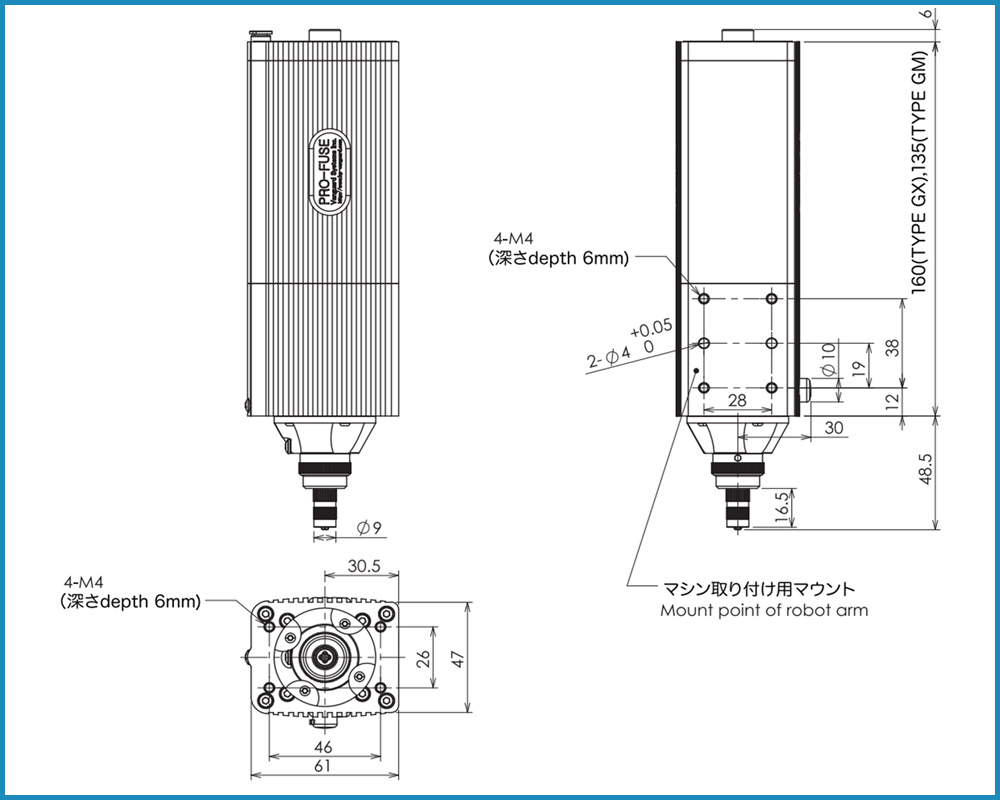
外形図
●PRO-FUSE TYPE S / TYPE L
●PRO-FUSE TYPE XL
●PRO-FUSE TYPE GX/GM
<デモンストレーション>PRO-FUSE M3ねじ締めロボット
インターフェイス
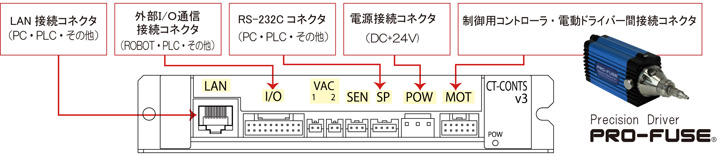
| 端子名称 | 略称 | メーカー | コネクタ型格 | 配線ケーブル・配線側コネクタ |
|---|---|---|---|---|
| 100BASE-T LAN接続端子 | LAN | 標準品 | RJ45 | お客様で御用意ください |
| ロボット通信接続端子 | I/O | JST | S20B-PUDSS-1 | お客様で御用意ください |
| 電源接続端子 | POW | JST | B3PS-VH | お客様で御用意ください |
| 制御用コントローラ・電動ドライバー間接続端子 | MOT | - | バンガード専用品 | 本セットに付属 |
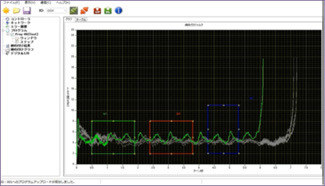
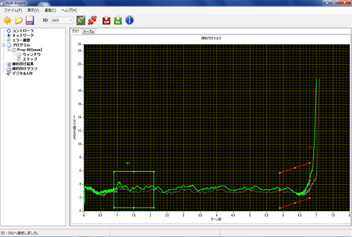
専用アプリ - ProE-Expert
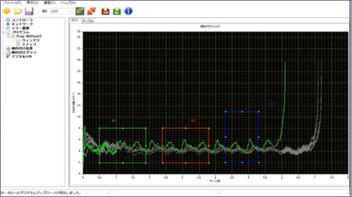
- ●ProE-Expertはマルチウィンドウ機能付き
- ●ねじ締め途中でのウインドウ判定機能、より多段階の条件設定
- ●ねじ締めトルク軌跡蓄積表示
- ●最大8個のねじ締め測定条件ウィンドウを設定可能で、GO/NO-GOの判定がリアルタイムに精度よく容易にできる
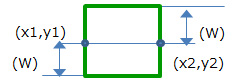
- ●ウィンドウは、5個のパラメータで設定
開始トルク:y1,終了トルク:y2,トルク幅:w
開始スピードx1,終了スピード:x2
■設定例1:グリーン長方形
y1=y2の値が同じ
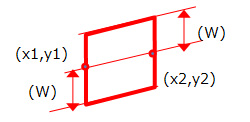
■設定例2:レッド ひし形
y1 and y2 の値が異なる
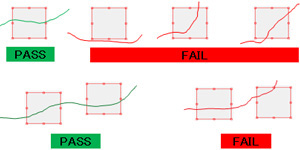
●"Pass":トルクグラフが、設定した全てのWindowの
左辺から入り、右辺に抜ければPass判定します
●"Fail":トルクグラフが、設定した全てのWindowの うち一つでも、Windowに入らない、あるいは
途中でウィンドウから外れてしまうとFail判定に
なります。
●"トルクアップ":トルクアップでのPass/Fail判定は
通常機能と同じです
オプション
| ビット | マウスピース(吸着ノズル) | ロングスライド (スライド機能付きスリーブ) |
||
 |
 |
 |
||
| ロボットI/Oケーブル | 電源ケーブル | Z軸ダンパー | ||
 |
 |
 |
トルク検査・測定器
| トルクチェッカー | ||||
 |