ホーム > 電動トルクドライバーPRO-FUSEシリーズの特長
電動トルクドライバーPRO-FUSEシリーズの特長
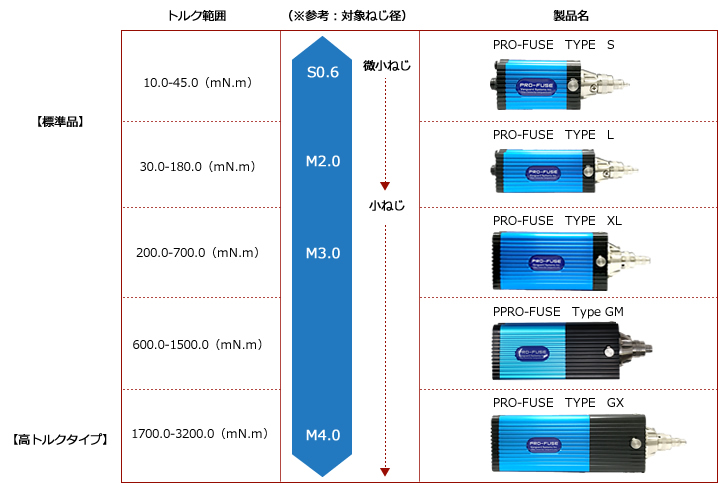
自動機用ロボット搭載型電動ドライバー「PRO-FUSEシリーズ」の特長は以下の通り!
特徴1高精度なトルク管理が可能
当社独自の制御技術により、ねじ締め経過、結果のトルクを設定・管理できます。
| 【機構】 |
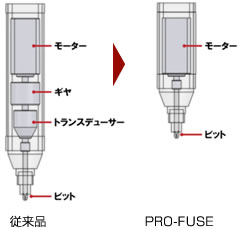
ギア、ロードセルが無く機械的損失がない、モータ直結のダイレクト制御 |
| |
 |
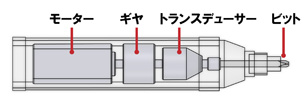 |
| PRO-FUSE |
従来品 |
|
| 【制御】 |
先進のアルゴリズムで高速・高精度トルク制御 |
特徴2最適なねじ締めを実現する為の多彩なねじ締めパターン
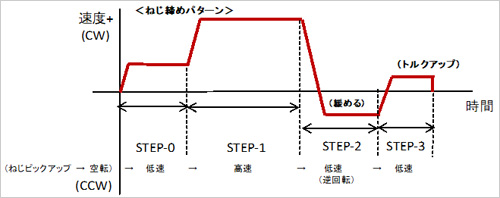
PRO-FUSEでは、様々なねじ締め条件に対し、回転速度の変更が可能。同一プログラムで逆回転を入れる事も可能です。
※ 逆回転を入れる際は、最終的トルクアップする形でプログラムして下さい。
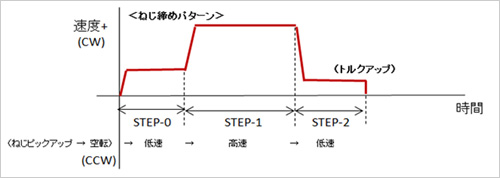
| ●推奨締付パターン: |
低速→高速→低速
ねじの山と下穴の山が噛み合うまで低速にし、噛み合った後を高速でネジ締め時間を短縮。
最終のトルクアップ手前を低速にすることでオーバーシュートを抑止します。
|
| ●噛み込みを逆回転で回避: |
締結前にトルクアップしてしまう際に有効。一度緩めることで噛み込みが外れ、ねじ浮きの抑止、斜め締め時の位置補正等にも有効。 |

多彩なねじ締めパターンを16通りプログラム可能
アプリケーションソフト(ProE-Expert)で簡単な操作でねじ締めパターン(プログラム)を確認することができます。
| ●その他: |
- タッピングねじのように、ねじ締め開始直後にトルクが上昇し、そのまま締結終了となってしまう現象を回避できます。
初期トルクアップをキャンセルすることが可能です。
- ねじ締め後、指定した角度(−360°~360°/1°毎)での増し締めが可能です。緩め方向への設定にも対応しています。
※ ツールタイプの最大値を超えるトルクが必要な場合は対応できません。
- 逆ねじにも対応しており、回転方向はCW/CCWの切り替えで設定可能です。
|
特徴3ねじ締め中のトルク値が取得可能・ねじ締め結果が取得可能 トレーサビリティ向上
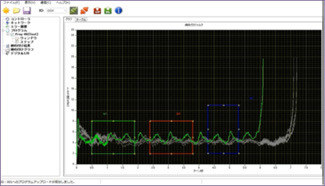
PRO-FUSEは、アプリケーションソフト(ProE-Expert)でねじ締め中のトルク値をグラフに表示可能。
ねじ締め最中を視覚的にとらえることで、品質の向上、トルクスタディ(研究や分析)の手助けを行えます。
| 【ねじ締めトルク変動】 |
|
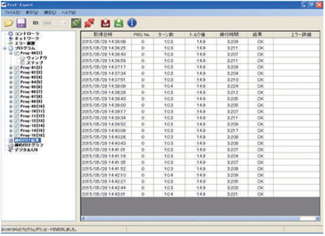
【ねじ締め結果】 |
 ProE-Expert ProE-Expert |
|
 |
- ■
- ねじ締め最中のトルク変動をビジュアル的にモニタリングする事が可能で、最適なねじ締めプログラムの作成や、ねじ締め条件算出に役立ちます。
- ■
- ウインドウ機能を使えば、ねじ締め途中経過での判定も可能です。
接着剤付きねじ、タッピングねじやプラスチックねじなど、各種ねじ締めの可能性を広げます。
|
|
- ■
- PRGNo/ターン数/トルク値/締付時間/結果/エラー詳細を表示します。(CSVファイルにて出力可能。)
- ■
- PRO-FUSEはEthernet通信またはRS232C通信で接続できます。
通信アプリを構築いただく事で、ねじ締めパターンの設定、ねじ締め・緩めなどの動作指示、ねじ締め結果の取得が、ロボットや、パソコンのアプリから可能です。
|
特徴6難関箇所のねじ締めのトータルソリューション
マウスピース、スライド、ビットの専用設計によって実現可能。
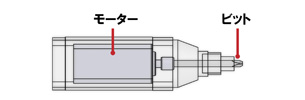
特徴7業界最速クラスのねじ締め付けサイクルタイムで安定した締め付けが可能
 |
|
- ●
- PRO-FUSEはギア、ロードセルが無く、モータ直結でコンパクト
- ●
- 高速モードでMAX1500回転が可能で、ねじ締めサイクルタイムが業界最速クラス
|
特徴8多彩な外部接続のインターフェイス
| 端子名称 |
略称 |
メーカー |
コネクタ型格 |
配線ケーブル・配線側コネクタ |
| 100BASE-T LAN接続端子 |
LAN |
標準品 |
RJ45 |
お客様で御用意ください |
| ロボット通信接続端子 |
I/O |
JST |
S20B-PUDSS-1 |
お客様で御用意ください |
| 電源接続端子 |
POW |
JST |
B3PS-VH |
お客様で御用意ください |
| 制御用コントローラ・電動ドライバー間接続端子 |
MOT |
- |
バンガード専用品 |
本セットに付属 |
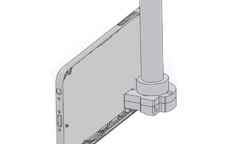
特徴9ロボット搭載専用設計な為、機器サイズがコンパクトと内部配管構造ですきっりした形状
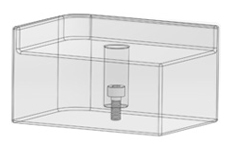
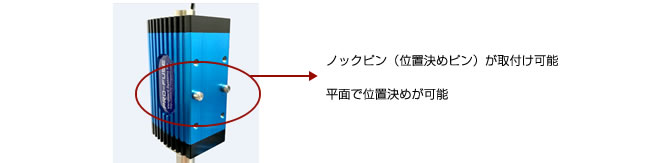
特徴10メンテナンス性と繰り返し脱着精度が良い
●ノックピンをドライバー側に付けることにより、位置決め精度が高く取付が容易です。
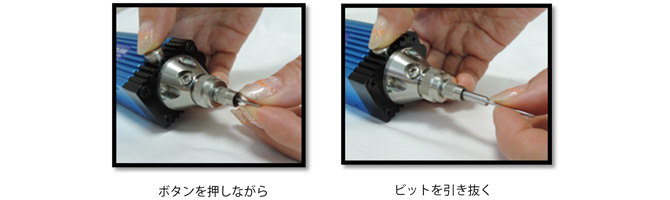
●ビット交換が容易。ドライバー(PRO-FUSE)本体をロボットから取り外すことなく、ワンプッシュで脱着可能です。
特徴11ランニングコストが安い
①ビットの長寿命 : ねじ締め付け完了直前に減速させることでビットの消耗を軽減します。
②構造がシンプル : ギアなどがなく、機械的故障がほとんどありません。